

The Best Products


Latest News
What are the structural components of a soldering robot
1. Mechanical body
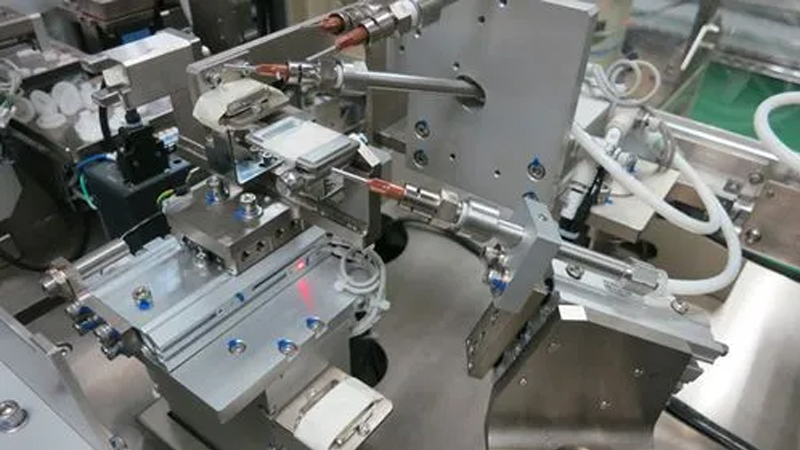
The mechanical body is the executing mechanism that robots rely on to complete job tasks. It is generally a robotic arm, also known as an operator or manipulator, which can perform the operations specified by the control system in a determined environment. The mechanical body of a typical industrial robot is generally composed of a hand (end effector), wrist, arm, waist, and base. The mechanical arm mostly adopts a joint type mechanical structure, generally with 6 degrees of freedom, of which 3 are used to determine the position of the end effector, and the other 3 are used to determine the direction (posture) of the end effector. The end effector on the robotic arm can be replaced with welding guns, suction cups, wrenches, and other operating tools according to operational needs.
2. Control system
The control system is the command center of a robot, equivalent to the human brain function, responsible for processing job instructions, internal and external environmental information, and making decisions based on predetermined ontology models, environmental models, and control programs, generating corresponding control signals. Through the driver, the joints of the execution mechanism are driven to move in the required order, along a determined position or track edge to complete specific tasks. From the perspective of the composition of the control system, There are two types of control systems: open-loop control system and closed-loop control system. From the perspective of control methods, there are program control system, adaptive control system, and intelligent control system.
3. Driver
The driver is the power system of a robot, equivalent to the cardiovascular system of a human, and generally consists of two parts: a driving device and a transmission mechanism. Due to different driving methods, driving devices can be divided into three types: electric, hydraulic, and pneumatic. The electric motor, hydraulic cylinder, and cylinder in the driving device can be directly connected to the operator or connected to the actuator through a transmission mechanism. Transmission mechanisms usually include gear transmission, chain transmission, harmonic gear transmission, screw transmission, belt transmission, and other types.
4. Sensor soldering machine manufacturer
Sensors are the sensing system of robots, equivalent to human sensory organs, and are an important component of robot systems, including two categories: internal sensors and external sensors. Internal sensors are mainly used to detect the state of the robot itself, providing necessary body state information for robot motion control, such as position sensors, speed sensors, etc. External sensors are used to perceive the working environment or working condition information outside the robot, and can be divided into two types: environmental sensors and end effector sensors